人工智能-第五周周报
本周任务:https://gitee.com/gaopursuit/ouc-dl/blob/master/week05.md
概要
本周学习 GAN 以及其衍生以及 Diffusion 模型
GAN
生成式对抗网络模型(Generative Adversarial Network),这个名字听起来很高级,但是它的内在逻辑其实很好理解
何为对抗?
简单的说,就是生成器(generator)和判别器(discriminator)之间的对抗,你可以将生成器理解为假币制作者,判别器理解为验钞员,假币制作者制作成能做出让验钞员信以为真的假币时,验钞员必定要提升自己验钞的能力,下次就不会被骗了,此时,假币制造者发现自己制作的假币无法通过检验,同样会开始提升工艺,于是,两者之间的对抗就开始了,最终二者的能力都会变得十分高,这便是对抗
何为生成式
想象一下,你有成百上千张猫的图片,让你寻找出猫的所有特征,然后再让你自己根据理解,生成出独一无二的猫的照片
换句话说,就是根据这些数据点的分布,拟合出对应的函数,或者理解为根据类对象,得出类的构造,进而就可以自己创建这个类的类对象了
判别器其实我们之前都学了怎么搭建,但生成器我们还是第一次见,那生成器是如何训练的呢?
我们来简述一下 GAN 的训练流程
- 初始化生成器和判别器
- 重复执行以下的步骤:
- 固定判别器,生成器采样噪声并从中生成图片,然后让判别器打分并优化判别器,使得真实图片的分数尽量高(最高分为1),生成的图片分数尽量低(最低分为0)
- 生成器计算损失后,反向传递优化生成器
- 在一个 epoch 结束后,将生成器转换为测试模型,输出训练后生成的图片
现在我们来看看实际的代码实现
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torchvision.utils import save_image
import os
# 超参数
gpu_id = '0'
if gpu_id is not None:
os.environ['CUDA_VISIBLE_DEVICES'] = gpu_id
device = torch.device('cuda')
else:
device = torch.device('cpu')
if os.path.exists('gan_images') is False:
os.makedirs('gan_images')
z_dim = 100
batch_size = 64
learning_rate = 0.0002
total_epochs = 200
# 定义模型
class Discriminator(nn.Module):
# 全连接判别器,用于 1x28x28的MNIST数据
def __init__(self):
super(Discriminator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=28*28, out_features=512, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=512, out_features=256, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第三层
layers.append(nn.Linear(in_features=256, out_features=1, bias=True))
layers.append(nn.Sigmoid())
self.model = nn.Sequential(*layers)
def forward(sekf, x):
x = x.view(x.size(0), -1)
validity = self.model(x)
return validity
class Generator(nn.Module):
# 全连接生成器
def __init__(self, z_dim):
super(Generator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=z_dim, out_features=128))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=128, out_features=256))
layers.append(nn.BatchNorm1d(256, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第三层
layers.append(nn.Linear(in_features=256, out_features=512))
layers.append(nn.BatchNorm1d(256, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层
layers.append(nn.Linear(in_features=512, out_features=28*28))
layers.append(nn.Tanh())
self.model = nn.Sequential(*layers)
def forward(sekf, x):
x = x.view(z)
x = view(-1, 1, 28, 28)
return x
# 初始化判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)
# 准备工作
# 初始化二值交叉熵损失
bce = nn.BCELoss().to(device)
ones = torch.ones(batch_size, 1).to(device)
zeros = torch.zeros(batch_size, 1).to(device)
# 初始化优化器,使用 Adam
g_optimizer = optim.Adam(generator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
d_optimizer = optim.Adam(discriminator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
# 加载 MNIST 数据集
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
dataset = torchvision.datasets.MNIST(root='gan_data/', train=True, transform=transform, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
# 随机产生 100 个向量,用于生成效果图
fixed_z = torch.randn([100, z_dim]).to(device)
# 开始训练
for epoch in range(total_epochs):
# 在训练阶段把生成器调成训练模型,后面再搞成测试模型
generator = generator.train()
for i, data in enumerate(dataloader):
#加载真实数据二部加载标签
real_images, _ = data
real_images = real_images.to(device)
# 从正态分布中采样 batch_size 个噪声,然后生成图片
z = torch.randn([batch_size, z_dim]).to(device)
fake_images = generator(z)
# 计算判别器损失并优化判别器
real_loss = bce(discriminator(real_images), ones)
fake_loss = bce(discriminator(fake_images.detach()), zeros)
d_loss = real_loss + fake_loss
d_optimizer.zero_grad()
d_loss.backward()
d_optimizer.step()
# 计算生成器损失并优化生成器
g_loss = bce(discriminator(fake_images), ones)
g_optimizer.zero_grad()
g_loss.backward()
g_optimizer.step()
# 输出损失
print("[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]" % (epoch, total_epochs, i, len(dataloader), d_loss.item(), g_loss.item()))
# 把生成器设置为测试模型,生成效果图并保存
generator = generator.eval()
fixed_fake_images = generator(fixed_z)
save_image(fixed_fake_images, 'gan_images/{}.png'.format(epoch), nrow=10, normalize=True)实践中发现,其实 GAN 还是很难训练的,我们来看看效果图
| epoch | 1 | 20 | 40 | 60 | 80 | 100 |
|---|---|---|---|---|---|---|
| output |  |  |  |  |  |  |
可以发现,原版 GAN 的效果还是有点差的,到 100 epoch 效果依然不是特别好,并且数字杂乱无章,咱先来解决一下数字杂乱无章的问题吧
cGAN
数字杂乱无章,主要是因为我们在训练的过程中,没有去管物品的标签导致的
比如,虽然我想让生成器生成一只狗给我,但是生成器给我生成了一只很逼真的猫,判别器和数据集里面的图片一比对,发现真实度很高,直接高分通过,给我输出了一只猫,这自然是不行的,因此,除了被训练物体本身,我们还要加上物品的标签,使得判别器在打分的时候,如果发现完全不是期望的东西,也会打出低分
代码实现
#coding:utf-8
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torchvision.utils import save_image
import numpy as np
import os
# 超参数
gpu_id = None
if gpu_id is not None:
os.environ['CUDA_VISIBLE_DEVICES'] = gpu_id
device = torch.device('cuda')
else:
device = torch.device('cpu')
if os.path.exists('cgan_images') is False:
os.makedirs('cgan_images')
z_dim = 100
batch_size = 64
learning_rate = 0.0002
total_epochs = 200
class Discriminator(nn.Module):
'''全连接判别器,用于1x28x28的MNIST数据,输出是数据和类别'''
def __init__(self):
super(Discriminator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=28*28+10, out_features=512, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=512, out_features=256, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层
layers.append(nn.Linear(in_features=256, out_features=1, bias=True))
layers.append(nn.Sigmoid())
self.model = nn.Sequential(*layers)
def forward(self, x, c): # c: 条件
x = x.view(x.size(0), -1)
validity = self.model(torch.cat([x, c], -1))
return validity
class Generator(nn.Module):
'''全连接生成器,用于1x28x28的MNIST数据,输入是噪声和类别'''
def __init__(self, z_dim):
super(Generator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=z_dim+10, out_features=128))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=128, out_features=256))
layers.append(nn.BatchNorm1d(256, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第三层
layers.append(nn.Linear(in_features=256, out_features=512))
layers.append(nn.BatchNorm1d(512, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层
layers.append(nn.Linear(in_features=512, out_features=28*28))
layers.append(nn.Tanh())
self.model = nn.Sequential(*layers)
def forward(self, z, c):
x = self.model(torch.cat([z, c], dim=1))
x = x.view(-1, 1, 28, 28)
return x
def one_hot(labels, class_num):
'''把标签转换成one-hot类型'''
tmp = torch.FloatTensor(labels.size(0), class_num).zero_()
one_hot = tmp.scatter_(dim=1, index=torch.LongTensor(labels.view(-1, 1)), value=1)
return one_hot
# 初始化构建判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)
# 初始化二值交叉熵损失
bce = torch.nn.BCELoss().to(device)
ones = torch.ones(batch_size, 1).to(device)
zeros = torch.zeros(batch_size, 1).to(device)
# 初始化优化器,使用Adam优化器
g_optimizer = optim.Adam(generator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
d_optimizer = optim.Adam(discriminator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
# 加载MNIST数据集
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
dataset = torchvision.datasets.MNIST(root='gan_data/', train=True, transform=transform, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
#用于生成效果图
# 生成100个one_hot向量,每类10个
fixed_c = torch.FloatTensor(100, 10).zero_()
fixed_c = fixed_c.scatter_(dim=1, index=torch.LongTensor(np.array(np.arange(0, 10).tolist()*10).reshape([100, 1])), value=1)
fixed_c = fixed_c.to(device)
# 生成100个随机噪声向量
fixed_z = torch.randn([100, z_dim]).to(device)
# 开始训练,一共训练total_epochs
for epoch in range(total_epochs):
# 在训练阶段,把生成器设置为训练模式;对应于后面的,在测试阶段,把生成器设置为测试模式
generator = generator.train()
# 训练一个epoch
for i, data in enumerate(dataloader):
# 加载真实数据
real_images, real_labels = data
real_images = real_images.to(device)
# 把对应的标签转化成 one-hot 类型
tmp = torch.FloatTensor(real_labels.size(0), 10).zero_()
real_labels = tmp.scatter_(dim=1, index=torch.LongTensor(real_labels.view(-1, 1)), value=1)
real_labels = real_labels.to(device)
# 生成数据
# 用正态分布中采样batch_size个随机噪声
z = torch.randn([batch_size, z_dim]).to(device)
# 生成 batch_size 个 ont-hot 标签
c = torch.FloatTensor(batch_size, 10).zero_()
c = c.scatter_(dim=1, index=torch.LongTensor(np.random.choice(10, batch_size).reshape([batch_size, 1])), value=1)
c = c.to(device)
# 生成数据
fake_images = generator(z,c)
# 计算判别器损失,并优化判别器
real_loss = bce(discriminator(real_images, real_labels), ones)
fake_loss = bce(discriminator(fake_images.detach(), c), zeros)
d_loss = real_loss + fake_loss
d_optimizer.zero_grad()
d_loss.backward()
d_optimizer.step()
# 计算生成器损失,并优化生成器
g_loss = bce(discriminator(fake_images, c), ones)
g_optimizer.zero_grad()
g_loss.backward()
g_optimizer.step()
# 输出损失
print("[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]" % (epoch, total_epochs, i, len(dataloader), d_loss.item(), g_loss.item()))
# 把生成器设置为测试模型,生成效果图并保存
generator = generator.eval()
fixed_fake_images = generator(fixed_z, fixed_c)
save_image(fixed_fake_images, 'cgan_images/{}.png'.format(epoch), nrow=10, normalize=True)效果图
| epoch | 1 | 20 | 40 | 60 | 80 | 100 |
|---|---|---|---|---|---|---|
| output | 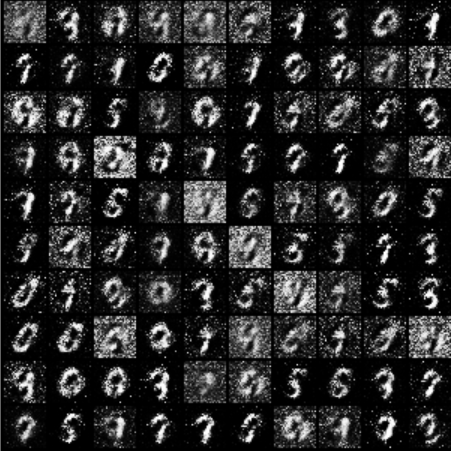 |  |  | 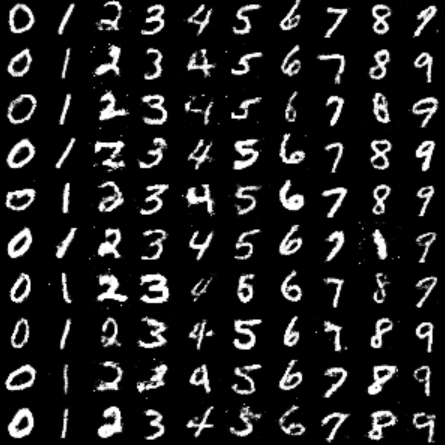 | 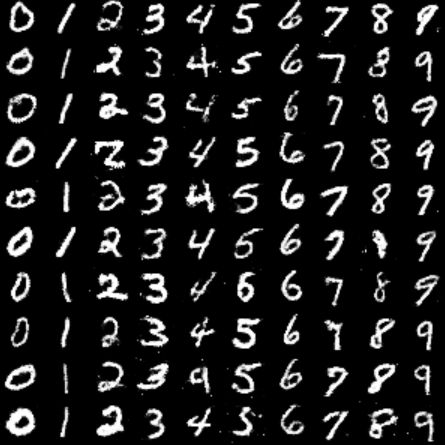 | 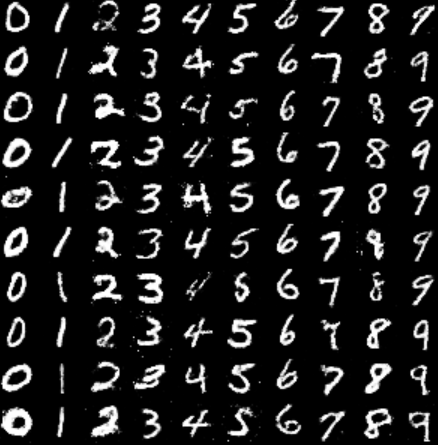 |
看上去确实更加规整了,那我们来继续优化 GAN 吧
dcGAN
聪明如你,应该想到可以用卷积来做这些事,之前我们的 GAN 和 cGAN 都用的是全连接网络,之前我们学习到,全连接处理图像性能很差,CNN 的性能更佳,那我们能不能借鉴一些 CNN 的经验呢
答案是肯定的,dcGAN 主要有以下改动:
- dcGAN 的生成器和判别器都舍弃了 CNN 的池化层,判别器保留 CNN 的整体架构(毕竟本质也是个图像识别网络),生成器则是将卷积层替换成了反卷积层(fractional-strided convolution)
- 在判别器和生成器中在每一层之后都是用了Batch Normalization(BN)层,有助于处理初始化不良导致的训练问题,加速模型训练,提升了训练的稳定性
- 利用 1x1 卷积层替换到所有的全连接层
- 在生成器中除输出层使用Tanh(Sigmoid)激活函数,其余层全部使用ReLu激活函数
- 在判别器所有层都使用LeakyReLU激活函数,防止梯度稀
直接看代码实现吧
#coding:utf-8
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torchvision.utils import save_image
import os
# 超参数
gpu_id = None
if gpu_id is not None:
os.environ['CUDA_VISIBLE_DEVICES'] = gpu_id
device = torch.device('cuda')
else:
device = torch.device('cpu')
if os.path.exists('dcgan_images') is False:
os.makedirs('dcgan_images')
z_dim = 100
batch_size = 64
learning_rate = 0.0002
total_epochs = 100
def weights_init_normal(m):
classname = m.__class__.__name__
if classname.find('Conv') != -1:
torch.nn.init.normal_(m.weight.data, 0.0, 0.02)
elif classname.find('BatchNorm2d') != -1:
torch.nn.init.normal_(m.weight.data, 1.0, 0.02)
torch.nn.init.constant_(m.bias.data, 0.0)
class Discriminator(nn.Module):
'''滑动卷积判别器'''
def __init__(self):
super(Discriminator, self).__init__()
# 定义卷积层
conv = []
# 第一个滑动卷积层,不使用BN,LRelu激活函数
conv.append(nn.Conv2d(in_channels=1, out_channels=16, kernel_size=3, stride=2, padding=1)) # in_channel是1因为这是灰度图
conv.append(nn.LeakyReLU(0.2, inplace=True))
# 第二个滑动卷积层,包含BN,LRelu激活函数
conv.append(nn.Conv2d(in_channels=16, out_channels=32, kernel_size=3, stride=2, padding=1))
conv.append(nn.BatchNorm2d(32))
conv.append(nn.LeakyReLU(0.2, inplace=True))
# 第三个滑动卷积层,包含BN,LRelu激活函数
conv.append(nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, stride=2, padding=1))
conv.append(nn.BatchNorm2d(64))
conv.append(nn.LeakyReLU(0.2, inplace=True))
# 第四个滑动卷积层,包含BN,LRelu激活函数
conv.append(nn.Conv2d(in_channels=64, out_channels=128, kernel_size=4, stride=1))
conv.append(nn.BatchNorm2d(128))
conv.append(nn.LeakyReLU(0.2, inplace=True))
# 卷积层
self.conv = nn.Sequential(*conv)
# 全连接层+Sigmoid激活函数
self.linear = nn.Sequential(nn.Linear(in_features=128, out_features=1), nn.Sigmoid())
def forward(self, x):
x = self.conv(x)
x = x.view(x.size(0), -1)
validity = self.linear(x)
return validity
class Generator(nn.Module):
'''反滑动卷积生成器'''
def __init__(self, z_dim):
super(Generator, self).__init__()
self.z_dim = z_dim
layers = []
# 第一层:把输入线性变换成256x4x4的矩阵,并在这个基础上做反卷机操作
self.linear = nn.Linear(self.z_dim, 4*4*256)
# 第二层:bn+relu
layers.append(nn.ConvTranspose2d(in_channels=256, out_channels=128, kernel_size=3, stride=2, padding=0)) # ConvTranspose2d 滑动反卷积
layers.append(nn.BatchNorm2d(128))
layers.append(nn.ReLU(inplace=True))
# 第三层:bn+relu
layers.append(nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=3, stride=2, padding=1))
layers.append(nn.BatchNorm2d(64))
layers.append(nn.ReLU(inplace=True))
# 第四层:不使用BN,使用tanh激活函数
layers.append(nn.ConvTranspose2d(in_channels=64, out_channels=1, kernel_size=4, stride=2, padding=2))
layers.append(nn.Tanh())
self.model = nn.Sequential(*layers)
def forward(self, z):
# 把随机噪声经过线性变换,resize成256x4x4的大小
x = self.linear(z)
x = x.view([x.size(0), 256, 4, 4])
# 生成图片
x = self.model(x)
return x
# 构建判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)
# 使用均值为0,方差为0.02的正态分布初始化神经网络
generator.apply(weights_init_normal)
discriminator.apply(weights_init_normal)
# 初始化二值交叉熵损失
bce = torch.nn.BCELoss().to(device)
ones = torch.ones(batch_size, 1).to(device)
zeros = torch.zeros(batch_size, 1).to(device)
# 初始化优化器,使用Adam优化器
g_optimizer = optim.Adam(generator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
d_optimizer = optim.Adam(discriminator.parameters(), lr=learning_rate, betas=[0.5, 0.999])
# 加载MNIST数据集
transform = transforms.Compose([transforms.Resize(32), transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,))])
dataset = torchvision.datasets.MNIST(root='gan_data/', train=True, transform=transform, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
# 随机产生100个向量,用于生成效果图
fixed_z = torch.randn([100, z_dim]).to(device)
# 开始训练,一共训练total_epochs
for epoch in range(total_epochs):
# 在训练阶段,把生成器设置为训练模型;对应于后面的,在测试阶段,把生成器设置为测试模型
generator = generator.train()
# 训练一个epoch
for i, data in enumerate(dataloader):
# 加载真实数据,不加载标签
real_images, _ = data
real_images = real_images.to(device)
# 用正态分布中采样batch_size个噪声,然后生成对应的图片
z = torch.randn([batch_size, z_dim]).to(device)
fake_images = generator(z)
# 计算判别器损失,并优化判别器
real_loss = bce(discriminator(real_images), ones)
fake_loss = bce(discriminator(fake_images.detach()), zeros)
d_loss = real_loss + fake_loss
d_optimizer.zero_grad()
d_loss.backward()
d_optimizer.step()
# 计算生成器损失,并优化生成器
g_loss = bce(discriminator(fake_images), ones)
g_optimizer.zero_grad()
g_loss.backward()
g_optimizer.step()
# 输出损失
print ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]" % (epoch, total_epochs, i, len(dataloader), d_loss.item(), g_loss.item()))
# 把生成器设置为测试模型,生成效果图并保存
generator = generator.eval()
fixed_fake_images = generator(fixed_z)
save_image(fixed_fake_images, 'dcgan_images/{}.png'.format(epoch), nrow=10, normalize=True)代码没什么好说的,我们直接看看效果
| epoch | 1 | 20 | 40 | 60 | 80 | 100 |
|---|---|---|---|---|---|---|
| output |  |  |  |  |  |  |
wGAN & wGAN-GP
wGAN 全称 Wasserstein GAN,他解决了 GAN 中出现的经典问题,就是判别器虽然很好,但是生成器学习到一定程度以后,就学不动了(loss 为 0 导致梯度消失)。而 wGAN 和 wGAN-GP 的解决方案很巧妙,但是具体解释起来偏数学,本人数学不是很好,这里就放两篇我觉得写的不错的文章参考了
https://zhuanlan.zhihu.com/p/25071913
http://zhuanlan.zhihu.com/p/52799555
具体训练起来,他训练其实很慢,比原版 GAN 慢得多,但是他好就好在稳定
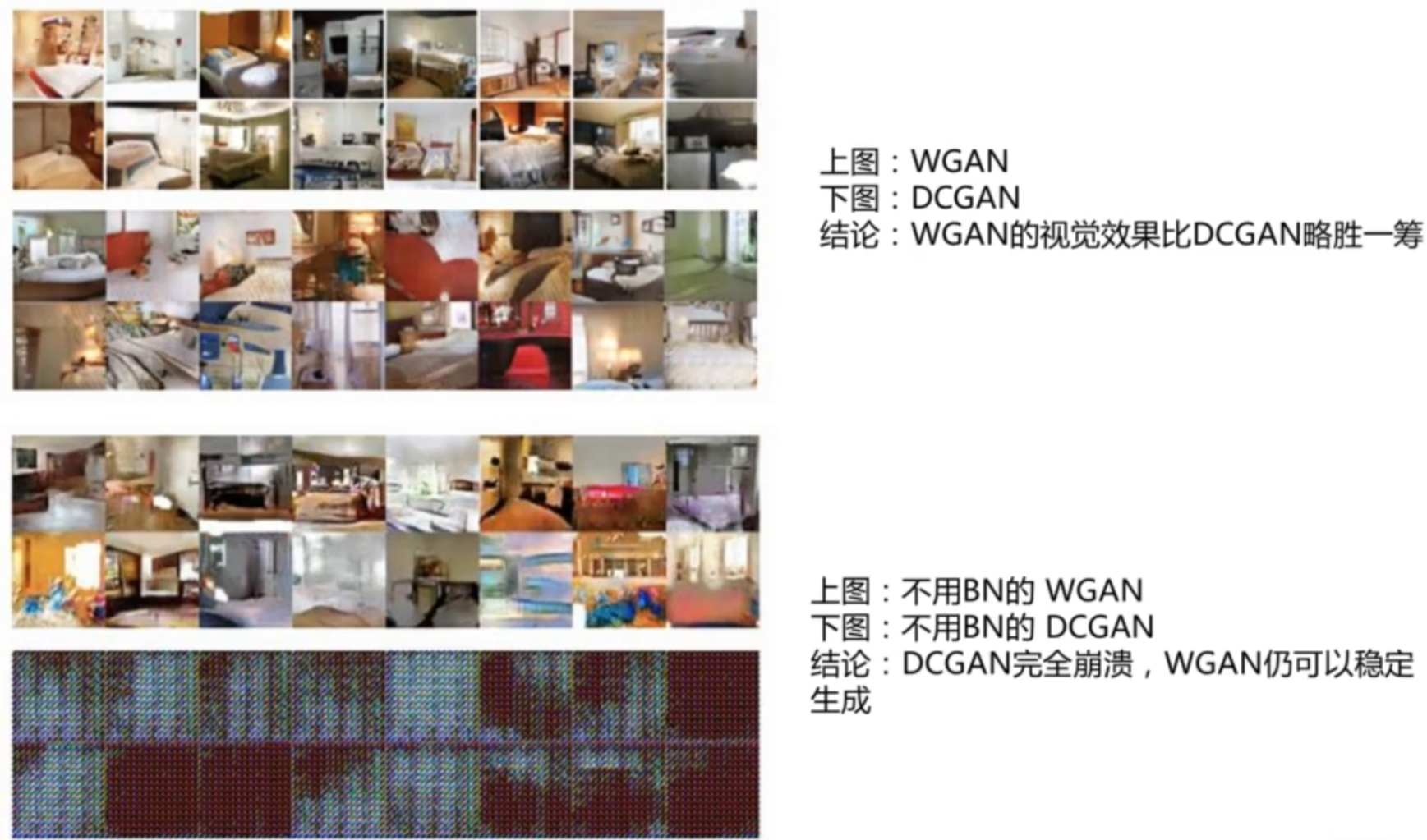
具体训练到 100 epoch 是什么样的就不放了,练到 200 epoch 都和原来 GAN 到 50 epoch 的样子差不多
来看看代码实现
#coding:utf-8
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torchvision.utils import save_image
import os
# 超参数
gpu_id = None
if gpu_id is not None:
os.environ['CUDA_VISIBLE_DEVICES'] = gpu_id
device = torch.device('cuda')
else:
device = torch.device('cpu')
if os.path.exists('wgan_images') is False:
os.makedirs('wgan_images')
z_dim = 100
batch_size = 64
learning_rate = 0.00005
total_epochs = 200
clip_value = 0.01
n_critic = 5
class Discriminator(nn.Module):
'''全连接判别器,用于1x28x28的MNIST数据'''
def __init__(self):
super(Discriminator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=28*28, out_features=512, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=512, out_features=256, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层:相比gan,不需要sigmoid
layers.append(nn.Linear(in_features=256, out_features=1, bias=True))
self.model = nn.Sequential(*layers)
def forward(self, x):
x = x.view(x.size(0), -1)
validity = self.model(x)
return validity
class Generator(nn.Module):
'''全连接生成器,用于1x28x28的MNIST数据'''
def __init__(self, z_dim):
super(Generator, self).__init__()
layers= []
# 第一层
layers.append(nn.Linear(in_features=z_dim, out_features=128))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=128, out_features=256))
layers.append(nn.BatchNorm1d(256, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第三层
layers.append(nn.Linear(in_features=256, out_features=512))
layers.append(nn.BatchNorm1d(512, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层
layers.append(nn.Linear(in_features=512, out_features=28*28))
layers.append(nn.Tanh())
self.model = nn.Sequential(*layers)
def forward(self, z):
x = self.model(z)
x = x.view(-1, 1, 28, 28)
return x
# 初始化构建判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)
# 初始化优化器,使用Adam优化器
g_optimizer = torch.optim.RMSprop(generator.parameters(), lr=learning_rate)
d_optimizer = torch.optim.RMSprop(discriminator.parameters(), lr=learning_rate)
# 加载MNIST数据集
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
dataset = torchvision.datasets.MNIST(root='gan_data/', train=True, transform=transform, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
# 随机产生100个向量,用于生成效果图
fixed_z = torch.randn([100, z_dim]).to(device)
# 开始训练,一共训练total_epochs
for epoch in range(total_epochs):
# 在训练阶段,把生成器设置为训练模式;对应于后面的,在测试阶段,把生成器设置为测试模式
generator = generator.train()
# 训练一个epoch
for i, data in enumerate(dataloader):
# 加载真实数据,不加载标签
real_images, _ = data
real_images = real_images.to(device)
# 从正态分布中采样batch_size个噪声,然后生成对应的图片
z = torch.randn([batch_size, z_dim]).to(device)
fake_images = generator(z)
# 计算判别器损失,并优化判别器
d_loss = - torch.mean(discriminator(real_images)) + torch.mean(discriminator(fake_images.detach()))
d_optimizer.zero_grad()
d_loss.backward()
d_optimizer.step()
# 为了保证利普斯次系数小于一个常数,进行权重截断
for p in discriminator.parameters():
p.data.clamp_(-clip_value, clip_value)
# 每优化n_critic次判别器, 优化一次生成器
if i % n_critic == 0:
g_loss = - torch.mean(discriminator(fake_images))
g_optimizer.zero_grad()
g_loss.backward()
g_optimizer.step()
# 输出损失
print ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]" % (epoch, total_epochs, i, len(dataloader), d_loss.item(), g_loss.item()))
# 每训练一个epoch,把生成器设置为测试模型,生成效果图并保存
generator = generator.eval()
fixed_fake_images = generator(fixed_z)
save_image(fixed_fake_images, 'wgan_images/{}.png'.format(epoch), nrow=10, normalize=True)wGAN-GP
#coding:utf-8
import torch
import torch.nn as nn
import torch.autograd as autograd
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torchvision.utils import save_image
import numpy as np
import os
# 超参数
gpu_id = None
if gpu_id is not None:
os.environ['CUDA_VISIBLE_DEVICES'] = gpu_id
device = torch.device('cuda')
else:
device = torch.device('cpu')
if os.path.exists('wgangp_images') is False:
os.makedirs('wgangp_images')
z_dim = 100
batch_size = 64
total_epochs = 200
learning_rate = 0.0001
weight_gp = 10
n_critic = 5
class Discriminator(nn.Module):
'''全连接判别器,用于1x28x28的MNIST数据'''
def __init__(self):
super(Discriminator, self).__init__()
layers = []
# 第一层
layers.append(nn.Linear(in_features=28*28, out_features=512, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=512, out_features=256, bias=True))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层:相比gan,不需要sigmoid
layers.append(nn.Linear(in_features=256, out_features=1, bias=True))
self.model = nn.Sequential(*layers)
def forward(self, x):
x = x.view(x.size(0), -1)
validity = self.model(x)
return validity
class Generator(nn.Module):
'''全连接生成器,用于1x28x28的MNIST数据'''
def __init__(self, z_dim):
super(Generator, self).__init__()
layers= []
# 第一层
layers.append(nn.Linear(in_features=z_dim, out_features=128))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第二层
layers.append(nn.Linear(in_features=128, out_features=256))
layers.append(nn.BatchNorm1d(256, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 第三层
layers.append(nn.Linear(in_features=256, out_features=512))
layers.append(nn.BatchNorm1d(512, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
# 输出层
layers.append(nn.Linear(in_features=512, out_features=28*28))
layers.append(nn.Tanh())
self.model = nn.Sequential(*layers)
def forward(self, z):
x = self.model(z)
x = x.view(-1, 1, 28, 28)
return x
# 初始化构建判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)
# 计算梯度惩罚正则项
def compute_gradient_penalty(D, real_samples, fake_samples):
# 在真实样本所在空间 和 生成样本空间 之间采样样本 (通过插值进行采样)
alpha = torch.Tensor(np.random.random((real_samples.size(0), 1, 1, 1))).to(device)
interpolates = (alpha * real_samples + ((1 - alpha) * fake_samples)).requires_grad_(True)
# 计算判别器对于这些样本的梯度
d_interpolates = D(interpolates)
fake = autograd.Variable(torch.Tensor(real_samples.shape[0], 1).fill_(1.0), requires_grad=False).to(device)
gradients = autograd.grad(
outputs=d_interpolates,
inputs=interpolates,
grad_outputs=fake,
create_graph=True,
retain_graph=True,
only_inputs=True,
)[0]
gradients = gradients.view(gradients.size(0), -1)
# 计算梯度损失
gradient_penalty = ((gradients.norm(2, dim=1) - 1) ** 2).mean()
return gradient_penalty
# 初始化优化器,使用Adam优化器
g_optimizer = torch.optim.Adam(generator.parameters(), lr=learning_rate, betas=[0.5, 0.9])
d_optimizer = torch.optim.Adam(discriminator.parameters(), lr=learning_rate, betas=[0.5, 0.9])
# 加载MNIST数据集
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,))])
dataset = torchvision.datasets.MNIST(root='gan_data/', train=True, transform=transform, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
# 随机产生100个向量,用于生成效果图
fixed_z = torch.randn([100, z_dim]).to(device)
# 开始训练,一共训练total_epochs
for epoch in range(total_epochs):
# 在训练阶段,把生成器设置为训练模式;对应于后面的,在测试阶段,把生成器设置为测试模式
generator = generator.train()
# 训练一个epoch
for i, data in enumerate(dataloader):
# 加载真实数据,不加载标签
real_images, _ = data
real_images = real_images.to(device)
# 从正态分布中采样batch_size个噪声,然后生成对应的图片
z = torch.randn([batch_size, z_dim]).to(device)
fake_images = generator(z)
# 计算判别器损失,并优化判别器
d_gan = - torch.mean(discriminator(real_images)) + torch.mean(discriminator(fake_images))
d_gp = compute_gradient_penalty(discriminator, real_images.data, fake_images.data)
d_loss = d_gan + weight_gp * d_gp
d_optimizer.zero_grad()
d_loss.backward()
d_optimizer.step()
# 每优化n_critic次判别器, 优化一次生成器
if i % n_critic == 0:
fake_images = generator(z)
g_loss = - torch.mean(discriminator(fake_images))
g_optimizer.zero_grad()
g_loss.backward()
g_optimizer.step()
# 输出损失
print ("[Epoch %d/%d] [Batch %d /%d] [D loss: %f %f] [G loss: %f]" % (epoch, total_epochs, i, len(dataloader), d_gan.item(), d_gp.item(), g_loss.item()))
# 每训练一个epoch,把生成器设置为测试模型,生成效果图并保存
generator = generator.eval()
fixed_fake_images = generator(fixed_z)
save_image(fixed_fake_images, 'wgangp_images/{}.png'.format(epoch), nrow=10, normalize=True)GAN 的应用
应用了解一下就行了
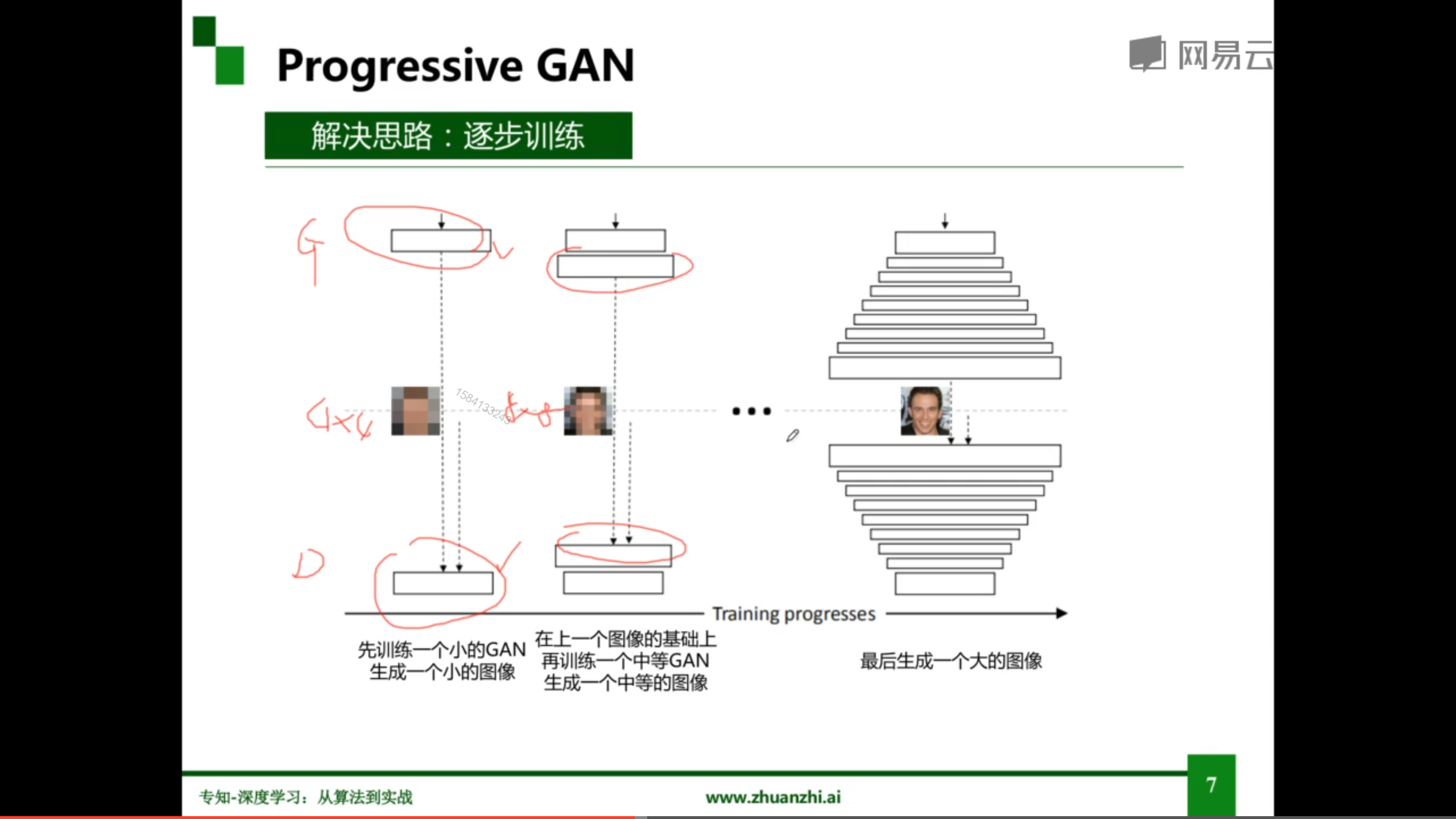
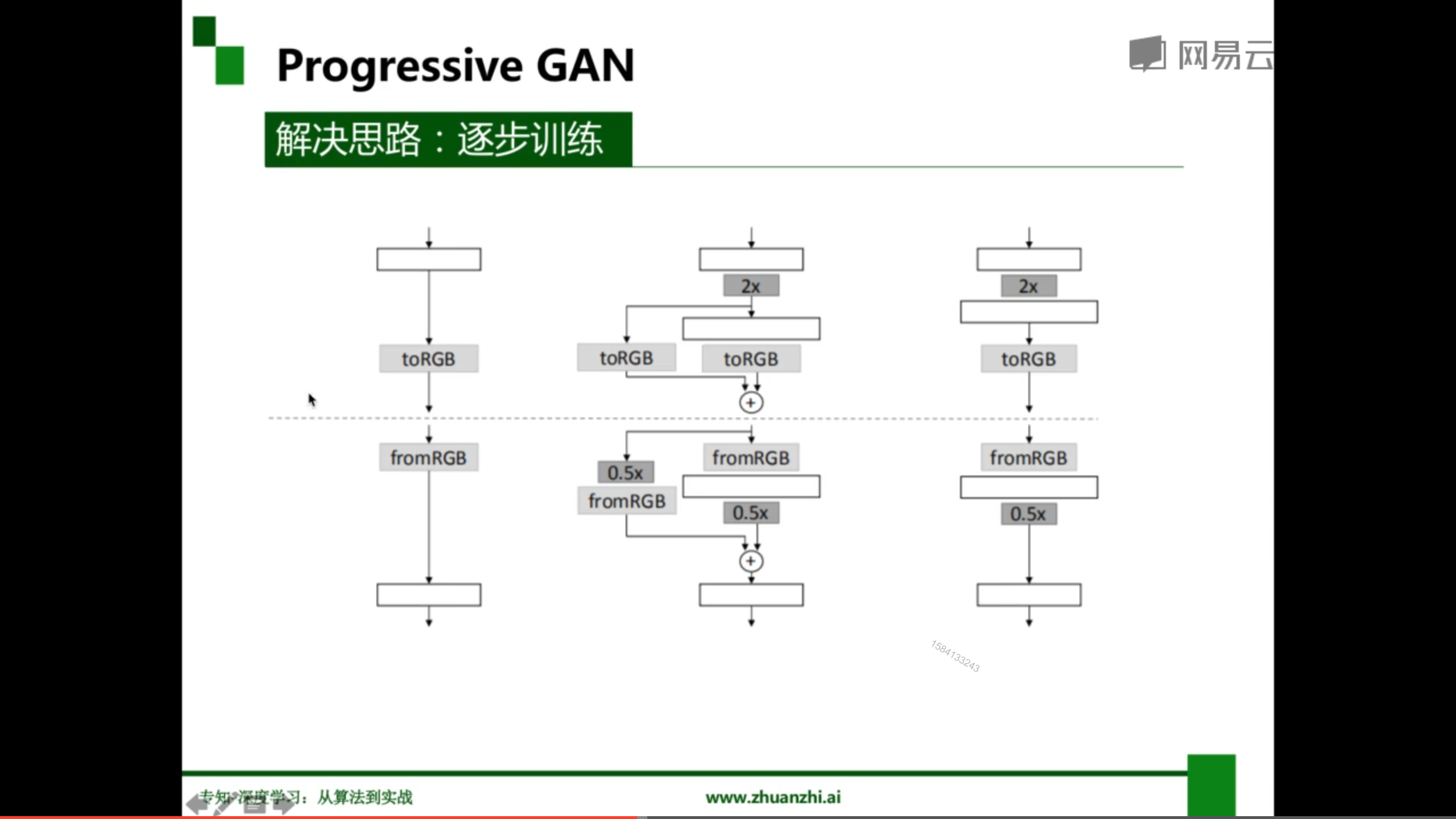
Progressive GAN
通过逐步训练(套娃),可以实现高分辨率的图像
Self-Attention GAN
SAGAN 是一个注意力驱动,长范围关联模型,人话就是,这玩意可以注意到全局的空间关系,而不是和传统一样的只注意细节
通过在 GAN 中引入自注意力机制,有以下好处
- 可以很好的处理长范围、多层次的依赖(人话:发现图像中的依赖关系)
- 生成图像中的每一个位置的细节和远端的细节并协调好
- 判别器还可以更准确地对全局图像结构实施复杂的几何约束
Diffusion
这个玩意炼丹老哥应该不陌生了,具体介绍就看老师推荐的介绍视频,我之后觉得可以神入研究的话我再继续写关于 Diffusion 的文章吧